ぶっちゃけ親機はMBを運ぶだけなので至ってシンプル♪
親機の絵は、K君に描いて貰いましたw親機なので、赤がOKなので後で炎の彩色をしました。 一応、自作の赤外線通信で動いてます。

| 親機とMB | |
|
向かって左がMB、右が親機。 ぶっちゃけ親機はMBを運ぶだけなので至ってシンプル♪ 親機の絵は、K君に描いて貰いましたw親機なので、赤がOKなので後で炎の彩色をしました。 一応、自作の赤外線通信で動いてます。 |
|
| 親機とMBその2 | |

|
別サイドから見たMB&親機 |
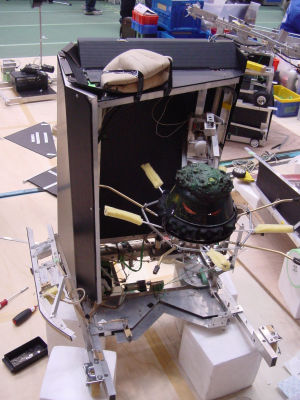
| 親機 | |
|
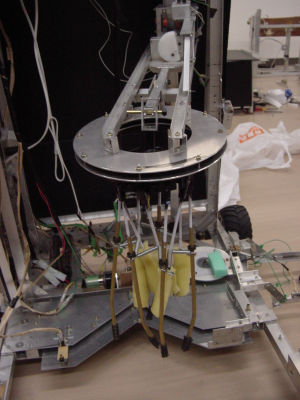
ちょっと火星人っぽいイメージw 左上に付いている黒いのが赤外線受光部。 どん兵衛と、みどりのたぬきの微妙なカップの大きさの違いを利用し、 アルミ箔&カラーセロファンによって極力外光を遮断。 駆動部は、足回り×2と、MB停止用1の合計3ヶ所。 |

|
| MB前(収納状態) | |
|
会場内にて撮影 空気圧を指定しないとルールに書いてあったのでなんとも投げやりなボールの取り付け位置がステキです。 中央の黒いヤツは通称「サヤマゴン」と呼ばれ、口?から10本の触手?を用いて獲物(ボール)を捕獲するヤツです。 |
| MB前(展開状態) | |
|
MBの定常状態 左側のスポンジが見えるのは床&スロープの壁感知用 中央の丸くて変な棒が出てるのがRBをキャッチするためのもの んで、右側のCD-Rとその先の棒みたいのが、RB感知用&ダンパ やっぱ、サヤマゴンがいないとちょっと寂しい |

|
| MB後ろ | |
|
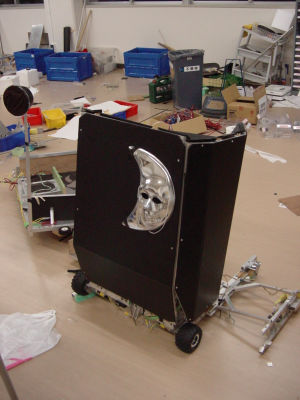
我らが守護神?ムーンが装着されてます。 試合当日は外してましたが・・・・・ 因みに、後ほどふき出しが設けられ、マシンのチェックリストが張られました。 |
| フロント | |
|
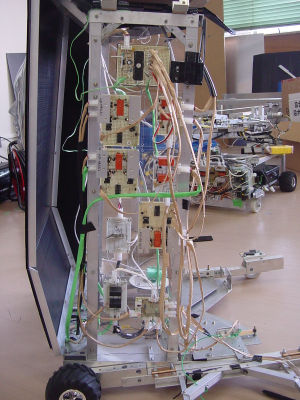
回路部分 配線とかが汚かったので、通常は黒いプラダンで覆われてます。 やっぱり、配線の赤とか青を隠すのはメンドかったよ。 因みに、使用してるPICは16F877です。意味もなく、隣に予備用PICとそれを抜くためのピンセットが付いてますw 因みに、ピンセットはダイソーで買ったプラスッチクのやつが非常に使いやすいです。 |
|
| 起動スイッチ | |
|
ちょっと見えにくいけど、何かアルミの板を押すことによって紐が引っ張られてリミットスイッチが入るっぽい。 後はリレーの自己保持回路にお任せなわけです。 |
| フロント | |
|
ちょっぴり、正面を拡大 詳しい動作は個々に説明 何か、後ろに吉野家の袋が見えるのはご愛嬌ということでw 真ん中の閉じてるヤツは、最初は開いていて、制御により閉じるというもの。 このマシンの要ですな。 |
|
| フロントダンパ | |
|
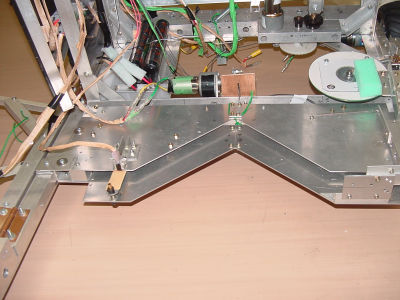
正面の説明その1 右奥に見えるギア達は、アームの左右回転部分。多分、また後で説明するかも んで、中央のモータと木でできた部分は、 左右の収納していた部分を紐で引っ掛けておくだけという至ってシンプルなモノ 最初のほうに動かすんで、それほど厳密には作りませんでした。 で、中央のアルミのゴツイやつは、フィールド中央のスポット検知用。 左下の方にちょこっと見えるリミットスイッチ用ダンパで、 このスイッチがONになると足回りが停止するようになっとります。 因みに試合一週間前に急遽作り直した代物 「もし、ボールがこの場所に転がってきたら・・・」という場面を想定していたのだが 実際そんな事態には陥りませんでした・・・・ |
| アームアップ | |
|
アーム上昇部 ラックを使ったシンプルなやつ。青かったのでマジックで塗って黒くしました。 右下にチラリと見えるのはアームの下降限界用スイッチ |

|
| アーム根元 | |
|
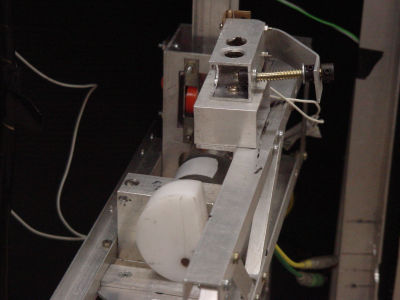
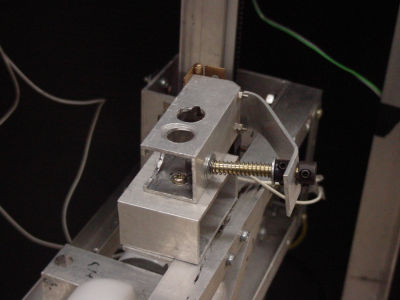
アームを閉じるための機構 半月上のカムを回転させて、てこの原理でキャッチ部を動かすというもの。 んで、右上のはダンパで、アームの回転を制御するもの。 このダンパがいい味を出してるんですよ。 っていうかさ、タミヤの青と赤のロゴまで隠さなくてはいけないってどういうことさ。 そんな訳で、モータの一部に白いテープが張ってあるのはそのせいw |
| アームカム | |
|
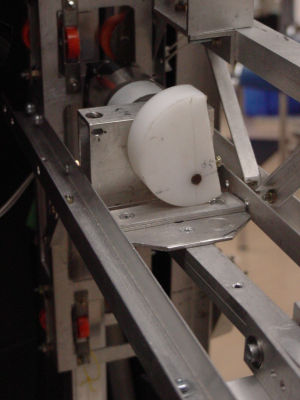
見てのとおり、回転軸が中心ではないため、モータが回ると下のアルミの板が押されるわけですよ。
んで、てこの原理でRBキャッチ部を持ち上げるんです。・・・ってその部分の写真無いですな。 簡単に説明すると、傘の骨をバネなりゴムなりで各々つないで、その根元より高い位置で固定。 んでもって、先ほどのカムの変位量によってその根元が上昇するので、アルミで作った枠に引っかかって 押されてガバッと触手?が閉じるわけですな。 |
|
| アームサイドダンパ | |
|
ダンパ 2週間ほど前から各部に取り付けられるようになった一品 見えないけど、根元にリミットスイッチが付いてます。 構造上の問題で、取り付けるのに手間取りました。 |
| RB感知用 | |
|
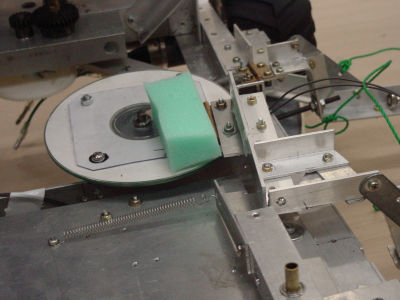
特にCD-Rである必要もないのですが、その円の中心を軸にバネとかでいろいろ調整して
RBを検知するヤツです。真ん中の黒いヤツがリミットスイッチですな。 そこから伸びるガムテープに包まれた配線が、今年のN●Kのルールに微妙に抵抗しているっぽい証です。 んで、その後ろの囲いみたいやつは、RBをうまくキャッチできなかった場合に備えて取り付けたもの。 意外とこいつでもOKでした。 |
|
| CD-R拡大 | |
|
意味もなく、拡大してみるテスト このアングルじゃ見えないけど、CD-Rの下のほうにバネとか付いてます。 因みに、目の前に見えるバネは中央のスポット検知用バンパのやつ。 |
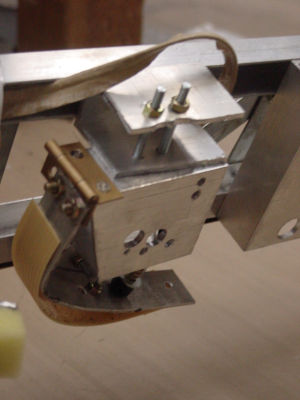
| スロープ感知用 | |
|
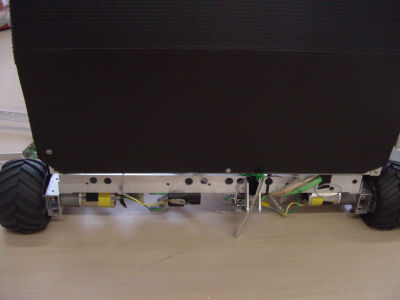
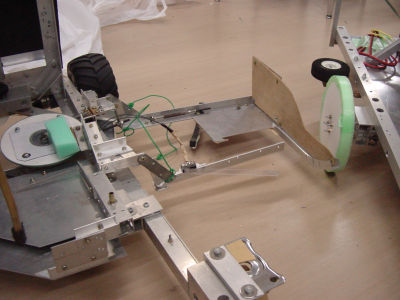
ある意味、このマシン最大のウリ!! 前方のスポンジに包まれたバンパ④と、地面に着いてるバンパ⑤で現在状況を感知 ちょっくら最初の行動チャートを見てもらえば分かると思うが、このMBは親機でスロープ前まで運ばれるわけです。 そして、親機から降りてしばらく前進するのですが、 その時④が押されておらず、⑤が押されていたらスロープの上に全てが乗っていると判断し、 この部分をスロープから落とそうと基本的に右旋回 すると、⑤が落ちるので、これ以上右旋回すると危ないので左旋回開始(この時点ではまだ④は押されない) すると、スロープの壁の部分に④がぶつかるのでそしたら前進開始 ってな感じでスロープを登るわけです。 これによって操縦者の最初のMBを離す位置はかなりアバウトでも良くなるので制御もしやすくなるわけ。 &スロープから落ちる心配も無し。 もし、某高専もこのような制御を取り入れていたら・・・・ |
|
| サイドダンパ | |
|
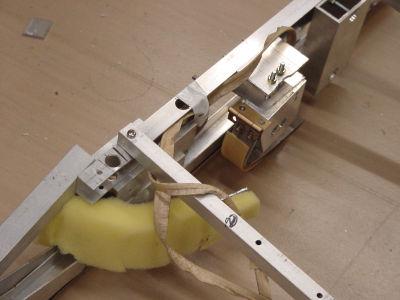
⑤の拡大部~~ 無駄な穴とか、そこら辺の材料を無理やり切って取り付けたさまが何とも富山高専らしくてステキです。 あと、しきいすべりテープは必須ですね~~ |