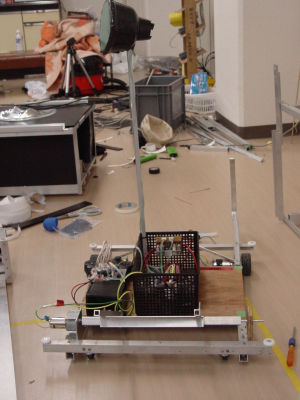
奥の方の出っ張りでMBについているスイッチを押して起動させます。
このマシンはスイッチを押すだけです。押したら操縦者はすることが無かった。
| 親機 | |
|
後ろ側から撮影 奥の方の出っ張りでMBについているスイッチを押して起動させます。 このマシンはスイッチを押すだけです。押したら操縦者はすることが無かった。 |
|
| 親機2 | |
|
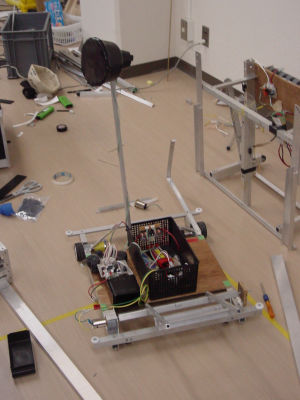
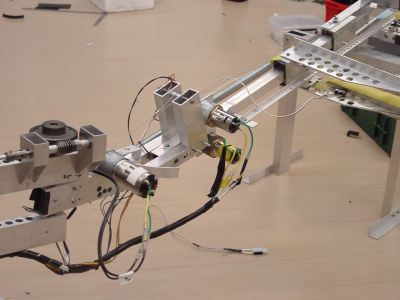
左斜め上から撮影 立っているアルミ材の上についているのが赤外線受光部です。 |
| MB下 | |
|
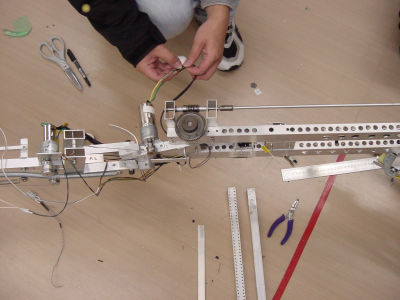
MBの下部分です。 この上にMB上が載ります。 両側面に起動スイッチがあります。 前に飛び出しているアルミ材が停止スイッチです。 オリンポス山にぶつかった時、このスイッチで停止して、MB上が動き出します。 |

|
| MB下with Moon | |

|
とりあえず置いてみました。 ええ、えーと・・・月です。まんま月です。 ええ、月神様です。 っていうか崇めてます。 ムーン |
| MB下内部 | |
|
本大会では大型Cds10個のうち上列5個を用いて 現在位置を感知、PWMを制御して目標位置を目指します。 |
レーザー受光部です。
|
| MBレーザー部 | |
|
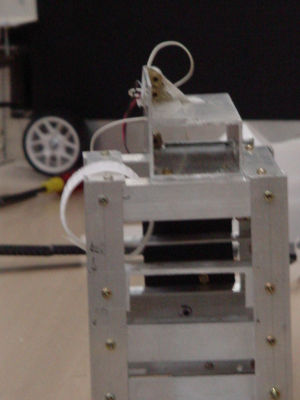
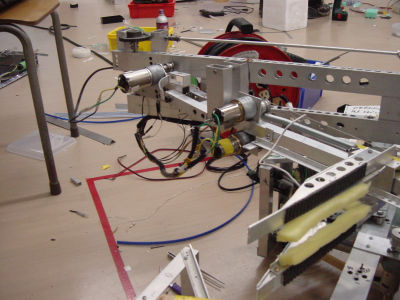
レーザー発射部です。 一番上についている金色の物体がレーザー部です。 MB下からコードで電源を確保しています。 |
| MB案2 | |
|
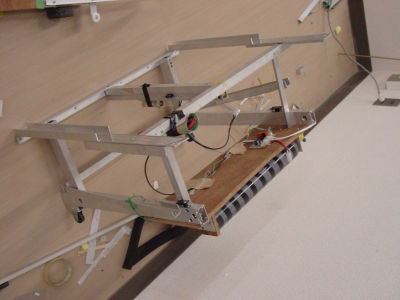
もうひとつのMB下です。 駆動輪を1つにすれば直進してくれるだろうということで 駆動輪が塩ビパイプになっています。 こいつも起動スイッチが両側面に付いています |
。
|
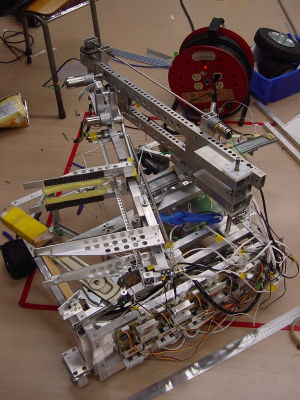
| MB本体 | |
|
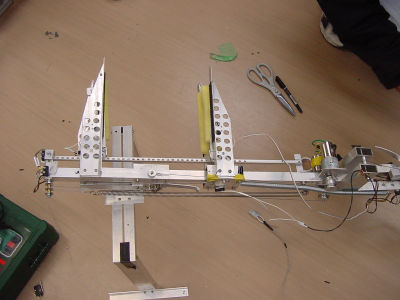
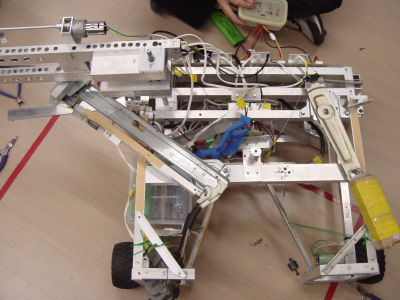
MB上の全体です。 写真は赤ゾーン仕様になっています。 後方に付いているのが回路です。コードがとてもごちゃごちゃしています。 |
| MB本体横 | |
|
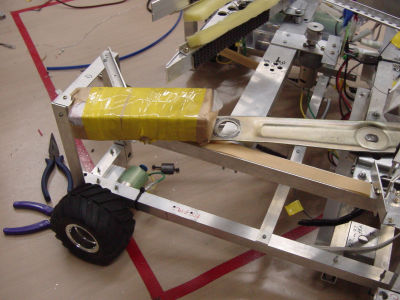
下のほうに見える黄色い物体はカウンターウェイトです。 中央に見える2つのはさみでローバーボールをはさみます。 |
|
| PW | |

|
ホ○ダ車のパワーウインドウを使っています。 |
| PW | |
|
この上を移動することによってアームが開閉します。 先(右端)と中間にパワーウィンドウの停止スイッチがついています |
上から見た図 。 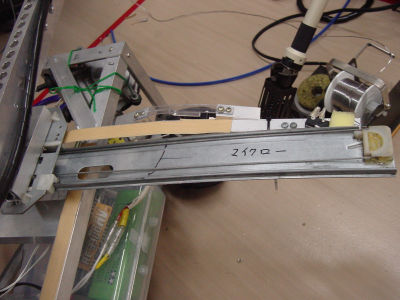
|
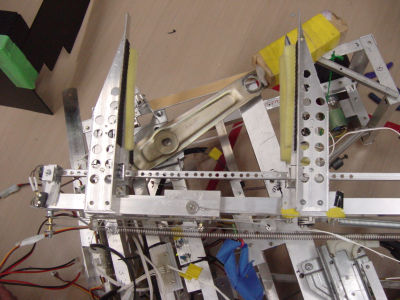
| はさみ | |
|
ローバーボールをつかむためのハンドです。 ローバーは中央にある穴の開いたアルミ材と それぞれのハンドに2つずつ付いているリミットスイッチで感知します。 |
| ひじ収納 | |
|
ひじ部をたたんだ状態です。 ウォームの下のほうに見えるモーターでアーム先端を持ち上げ、穴にはまっているローバーを抜けやすくします |
|
| ひじ開放 | |
|
左側がアームの根本です。 ウォームギアを支えている軸に非常に無理をさせています。 |
| Open | |
|
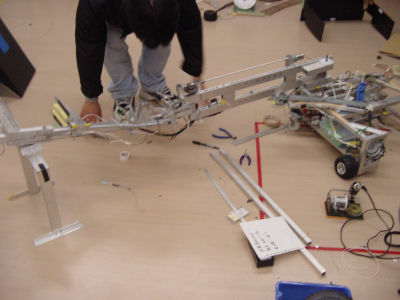
アームを開いた状態です。 アーム全長は約1.4mです。 |

|
| はさみ開放 | |
|
これでローバーボールをつかんでスポット上に持ってきます。 |
| ひじ開放 | |
|
中央に見えるウォームギヤでアームの先部分を動かします。 子機上の角度がずれても補正できます。 |
|
| 肩開放 | |
|
パワーウィンドウを開くことによってアーム自体を開きます。 |
| カウンターウェイト | |
|
これを開くことによってバランスをとります。 ちなみに中身は鉛の塊(約4kg)です。 |
|
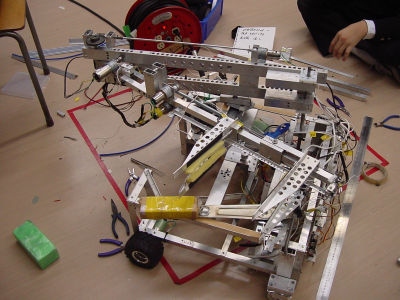
| 開放全景 | |
|
斜め前から |
| 開放全景2 | |
|
斜め後ろから |
|
| 回路 | |
|
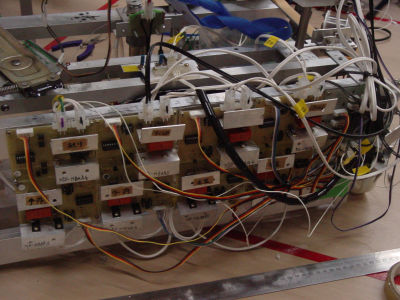
9-hariさんに自主休校して作ってもらいました。 |